| 사건번호 | 2016허1710 거절결정(특) |
|---|---|
| 판례제목 | 2016허1710 거절결정(특) |
| 출원번호 | 제10-2012-7030207호 |
| 분야 | 특허/실용신안 |
| 판결일 | 2016-10-28 |
| 법원명 | 특허법원 |
| 원고 | 미디어텍 인크.(MediaTek Inc.) |
| 피고 | 특허청장 |
| 판사 | 오영준, 권동주, 김동규 |
| 판결결과 | 거절결정(특) |
| 주문 | 1. 특허심판원이 2016. 1. 13. 2014원7004호 사건에 관하여 한 심결을 취소한다. 2. 소송비용은 피고가 부담한다. |
| 청구취지 | 주문과 같다. |
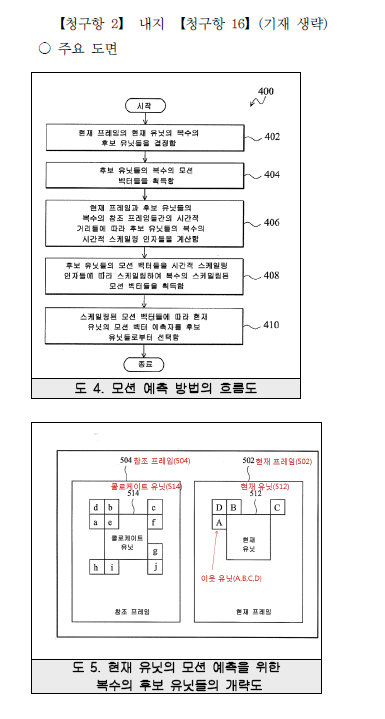
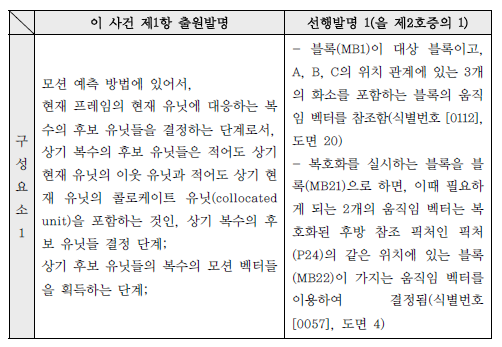
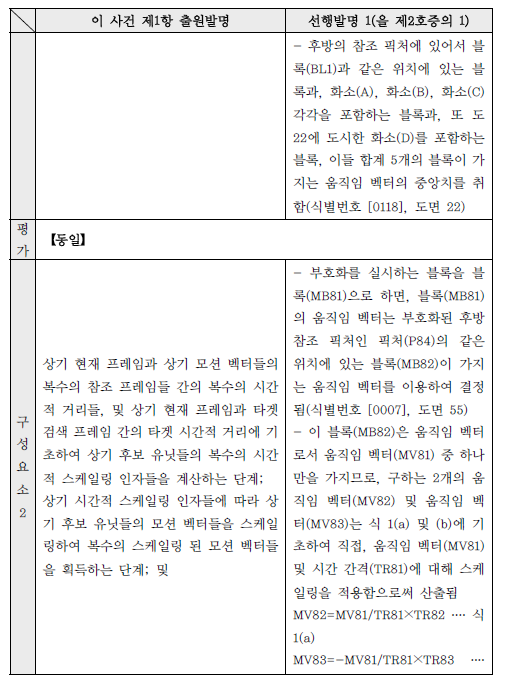
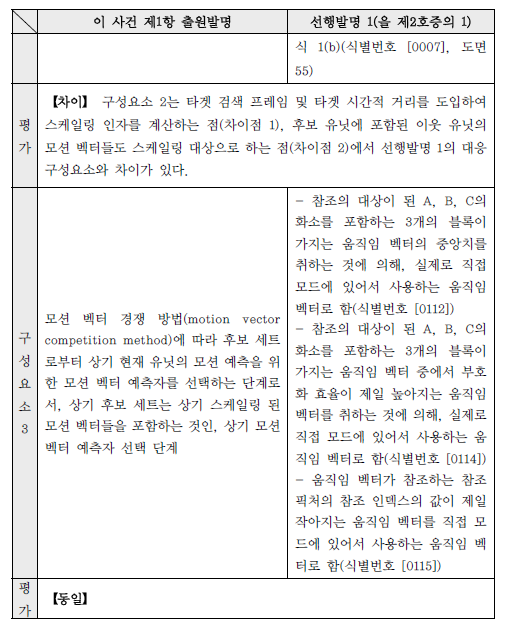
| 기초사실 | 1. 기초사실 가. 이 사건 심결의 경위 1) 원고는 2012. 11. 19. 발명의 명칭을 ‘모션 예측 방법’으로 하는 발명(이하‘이 사건 출원발명’이라 한다)의 특허를 출원하였다.그러나 특허청 심사관은 2013. 12. 10. ‘이 사건 출원발명의 청구범위 중 독립항인 청구항 1과 그 종속항인 청구항 2 내지 6은 선행발명 1로부터, 독립항인청구항 7과 그 종속항인 청구항 8 내지 16은 선행발명 2로부터 각각 용이하게발명할 수 있어 모두 진보성이 부정되므로 특허법 제29조 제2항에 따라 특허를받을 수 없다’는 취지로 거절이유를 통지하였다. 2) 이에 원고는 2014. 2. 10. 명세서 등을 보정하고 의견서를 제출하였으나,특허청 심사관은 2014. 6. 17. 앞서 본 거절이유가 해소되지 않았다며 이 사건출원발명에 대한 특허등록을 거절하는 결정을 하였다.이에 원고가 2014. 7. 18. 다시 명세서 등을 보정(이하 2014. 7. 18.자 보정에 의한 이 사건 출원발명의 청구항 1을 ‘이 사건 제1항 출원발명’이라 한다)하고 의견서를 제출하여 재심사를 청구였으나, 특허청 심사관은 2014. 8. 12.‘2013. 12. 10.자 거절이유가 해소되지 아니하였다’는 이유로 다시 이 사건 출원발명에 대하여 특허등록을 거절하는 결정을 하였다. 3) 이에 대하여 원고가 2014. 11. 12. 특허심판원 2014원7004호로 불복심판을 청구하였다.그러나 특허심판원은 2016. 1. 13. ‘이 사건 제1항 출원발명이 선행발명 1에의하여 진보성이 부정되어 특허를 받을 수 없고, 특허출원에서 특허청구범위가둘 이상의 청구항으로 이루어진 경우에 어느 하나의 청구항이라도 거절이유가있으면 그 출원은 일체로서 거절되어야 하므로, 더 나아가 이 사건 출원발명의나머지 청구항에 대하여 살펴볼 필요 없이 이 사건 출원발명을 거절한 원결정은적법하다. 이 사건 제1항 출원발명이 특허를 받을 수 없다’는 이유로 원고의 위심판청구를 기각하는 이 사건 심결을 하였다. 나. 원고의 이 사건 출원발명(갑 제4호증) ○ 발명의 명칭: 모션 예측 방법 ○ 출원일/출원번호: 2012. 11. 19. / 제10-2012-7030207호 ○ 발명의 개요 이 사건 출원발명은 비디오 프로세싱에 적용되는 모션 예측 방법에 관한것으로, 이웃 유닛과 콜로케이트 유닛의 모션벡터들을 동시에 고려하여 모션 벡터 예측자(MVP : motion vector predictor, 이하 ‘MVP’라 한다)의 정확도를향상시키는 것을 목적으로 한다(식별번호 [0002], [0008], [0009] 참조).위와 같은 목적을 달성하기 위해 이 사건 출원발명은 현재 유닛의 MVP를계산할 때, 그 정확도를 향상시키기 위하여 이웃 유닛들(A, B, C, D)의 모션벡터뿐만 아니라 이웃 유닛들의 모션벡터 중간값과 현재 유닛의 위치와 동일한 참조 프레임 내 위치에 있는 콜로케이트 유닛(514)의 모션벡터도 고려하는 모션예측 방법을 제공한다(식별번호 [0007], [0019], 도 5 참조). ○ 청구범위(2014. 7. 18. 보정된 것) 【청구항 1】 모션 예측 방법에 있어서, 현재 프레임의 현재 유닛에 대응하는 복수의 후보 유닛들을 결정하는 단계로서, 상기 복수의 후보 유닛들은 적어도 상기 현재 유닛의 이웃 유닛과 적어도 상기 현재 유닛의 콜로케이트 유닛(collocated unit)을 포함하는 것인, 상기 복수의 후보 유닛들 결정 단계; 상기후보 유닛들의 복수의 모션 벡터들을 획득하는 단계(이하, ‘구성요소 1’이라 한다); 상기 현재 프레임과 상기 모션 벡터들의 복수의 참조 프레임들 간의 복수의 시간적 거리들, 및 상기 현재 프레임과 타겟 검색 프레임 간의 타겟 시간적거리에 기초하여 상기 후보 유닛들의 복수의 시간적 스케일링 인자들을 계산하는 단계; 상기 시간적 스케일링 인자들에 따라 상기 후보 유닛들의 모션 벡터들을 스케일링하여 복수의 스케일링 된 모션 벡터들을 획득하는 단계(이하, ‘구성요소 2’라 한다); 및 모션 벡터 경쟁 방법(motion vector competition method)에 따라 후보 세트로부터 상기 현재 유닛의 모션 예측을 위한 모션 벡터 예측자를 선택하는 단계로서, 상기 후보 세트는 상기 스케일링 된 모션 벡터들을 포함하는 것인, 상기 모션벡터 예측자 선택 단계(이하, ‘구성요소 3’이라 한다)를 포함하는 모션 예측 방법. 다. 선행발명 1) 선행발명 1(을 제2호증의 1) 선행발명 1은 2004. 7. 22. 공개된 일본 공개특허공보 특개2004-208258호에 게재된 ‘움직임 벡터 계산 방법’에 관한 발명이다.선행발명 1에는 ① 참조되는 콜로케이트 유닛이 복수의 모션 벡터를 가진 경우에 시간 스케일링 기법을 통해 부호화 대상 유닛의 모션벡터를 계산하는 방법(식별번호 [0086] 내지 [0112], 도 13 내지 19 참조)과 ② 동일 픽처 내의 이웃유닛의 모션 벡터를 참조하여 부호화 대상 유닛의 모션 벡터를 계산하는 방법(식별번호 [0112] 내지 [0121], 도 22 내지 30 참조)이 개시되어 있다. 2) 선행발명 2(을 제3호증) 선행발명 2는 2006. 7. 18. 공개된 ITU 연구그룹 16의 회의 자료로 ‘움직임벡터 선택 및 코딩에 적용되는 경쟁 기반 기법’에 관한 발명이다.선행발명 2에는 ① 시간 예측자(콜로케이트 유닛의 모션 벡터)와 공간 예측자(이웃 유닛의 모션 벡터)를 함께 고려하여 부호화 대상 유닛의 모션 벡터 예측자를 계산하기 위한 후보 유닛 집합을 구성하는 방법(3면)과 ② 위와 같이 구성된 후보 유닛 집합의 각 원소들을 경쟁시켜 부호화 대상 유닛의 모션 벡터를선택하는 방법(2 내지 5면)이 개시되어 있다. 【인정 근거】 다툼 없는 사실, 갑 제1 내지 8호증, 을 제2호증의 1, 제3호증의 각 기재, 변론 전체의 취지 2. 이 사건 심결의 위법 여부 가. 이 사건의 심리범위 거절결정 불복심판청구를 기각하는 심결의 취소소송단계에서 특허청은 심결에서 판단되지 않은 것이라고 하더라도 거절결정의 이유와 다른 새로운 거절이유에 해당하지 않는 한 심결의 결론을 정당하게 하는 사유를 주장·입증할 수 있고, 심결취소소송의 법원은 달리 볼 만한 특별한 사정이 없는 한, 제한 없이 이를 심리ㆍ판단하여 판결의 기초로 삼을 수 있다(대법원 2003. 2. 26. 선고2001후1617 판결 등 참조). 비록 이 사건 심결에서 이 사건 제7항 내지 제16항 출원발명의 진보성 여부에 대해서는 심리ㆍ판단하지 아니하였다고 하더라도, 기초사실에서 본 바와 같이, 특허청 심사관이 이 사건 제7항 내지 제16항 출원발명은 선행발명 2에 의하여 진보성이 부정된다는 점을 거절결정 이유 중 하나로 제시하였으므로, 이에관하여 피고가 주장ㆍ증명하는 경우에 위 법리에 비추어 이 법원이 위와 같은점에 대해서도 심리ㆍ판단하여 이를 판결의 기초로 삼을 수 있으나, 피고가 위와 같은 점에 대해서 전혀 주장조차 하지 아니하였으므로, 이 사건 소에서는 이사건 제1항 출원발명의 진보성이 선행발명 1에 의하여 부정되는지에 대해서만심리하고, 이에 기초하여 이 사건 심결의 위법 여부를 판단한다. |
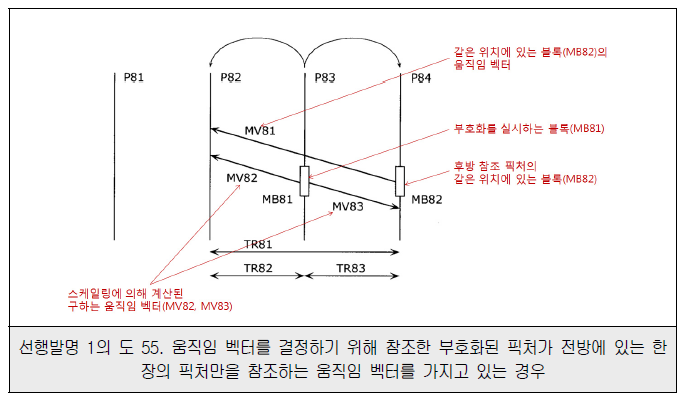
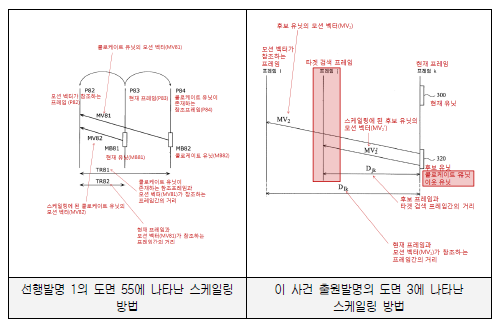
| 이사건 특허발명의 진보성이 부정되는지 여부 | 나. 이 사건 제1항 출원발명의 진보성 부정 여부 1) 선행발명 1과의 구성 대비 이 사건 제1항 출원발명과 선행발명 1을 구성요소별로 대비하면 아래 표 와 같다. 가) 구성요소 1의 대비 구성요소 1은 현재 유닛의 모션 벡터를 예측할 때 참조되는 후보 유닛들을 결정하고 후보 유닛들의 모션 벡터들을 획득하는 단계로, 이웃 유닛과 콜로케이트 유닛을 후보 유닛에 동시에 포함시키고 이들의 모션 벡터를 획득하는 것을 특징으로 한다. 선행발명 1(을 제2호증의 1)에는 ① 대상 블록(현재 유닛)과 동일 픽처 내의주변 블록들(이웃 유닛)의 움직임 벡터(모션벡터)들을 참조하여 대상 블록의 움직임 벡터를 예측하는 방법(식별번호 [0112]), ② 대상 블록의 픽처와 다른 픽처에서 대상 블록과 같은 위치에 있는 블록(콜로케이트 유닛)의 움직임 벡터를 참조하여 대상 블록의 움직임 벡터를 예측하는 방법(식별번호 [0057]), ③ 후방의참조 픽처에 있어서 대상 블록과 같은 위치에 있는 블록(콜로케이트 유닛)의 움직임 벡터와 대상 블록의 주변 블록들(이웃 유닛)의 움직임 벡터를 참조하여 대상 블록의 움직임 벡터를 예측하는 방법(식별번호 [0118])이 나타나 있다. 그런데 그 중 ③은 이웃 유닛과 콜로케이트 유닛을 동시에 후보 유닛에 포함시키고,이들의 모션 벡터들을 획득한다는 점에서 구성요소 1과 동일하다.따라서 구성요소 1은 선행발명 1의 대응구성요소와 동일하다. 나) 구성요소 2의 대비 구성요소 2는 후보 유닛들의 모션 벡터들의 스케일링 인자를 타겟 시간적거리를 이용하여 계산하고, 계산된 스케일링 인자를 이용하여 모션 벡터를 스케일링하는 단계이다. 이는 선행발명 1에서 ‘부호화를 실시하는 블록을 블록(MB81)으로 하면, 블록(MB81)의 움직임 벡터는 부호화된 후방 참조 픽처인 픽처(P84)의 같은 위치에있는 블록(MB82)이 가지는 움직임 벡터를 이용하여 결정된다. 이 블록(MB82)은 움직임 벡터로서 움직임 벡터(MV81) 중 하나만을 가지므로, 구하는 두 개의움직임 벡터 MV82와 MV83은 MV82=MV81/TR81×TR82 및 MV83=-MV81/TR81×TR83이라는 수식에 기초하여 직접, 움직임 벡터(MV81) 및 시간간격(TR81)에 대해 스케일링을 적용함으로써 산출된다’는 취지의 기재(식별번호[0007], 도면 55)를 비롯한 여타의 참조 픽처의 같은 위치에 있는 블록의 움직임 벡터에 대한 스케일링 인자 계산 및 스케일링 적용방법에 대한 기재(식별번호 [0098], 도면 12 내지 19)에 대응된다. 구성요소 2와 선행발명 1의 대응구성요소는 후보 유닛들의 모션벡터(참조 픽처의 같은 위치에 있는 블록의 움직임 벡터)에 대해서 스케일링 인자를 계산하고, 계산된 스케일링 인자를 이용하여 모션 벡터(움직임 벡터)를 스케일링하는점에서는 동일하다. 그러나 구성요소 2는 타겟 검색 프레임에 의해서 결정되는 타겟 시간적 거리도 이용하여 스케일링 인자를 계산하는 반면에 선행발명 1의 대응구성요소는 참조 프레임(픽처)에 의해서 결정되는 시간적 거리만을 이용하여 스케일링 인자를계산하는 점에서 차이가 있다(이하 ‘차이점 1’이라 한다). 또한, 구성요소 2는 후보 유닛에 포함된 이웃 유닛의 모션 벡터들도 스케일링 대상으로 하는 반면에, 선행발명 1의 대응구성요소는 참조 픽처의 같은 위치에 있는 블록의 움직임 벡터(콜로케이트 유닛의 모션 벡터)만 스케일링 대상으로 하는 점에서 차이가 있다(이하 ‘차이점 2’라 한다). 다) 구성요소 3의 대비 구성요소 3은 모션 벡터 경쟁 방법(motion vector competition method)에 따라 스케일링 된 모션 벡터를 포함하고 있는 후보 세트로부터 현재 유닛의모션 벡터 예측자를 선택하는 단계이다.이 사건 제1항 출원발명의 청구범위에서 모션 벡터 경쟁 방법(motionvector competition method)에 대하여 구체적으로 한정하고 있지 아니하므로,선행발명 1에 나타나 있는 ① 후보가 되는 움직임 벡터의 중앙치를 취하는 방법(식별번호 [0112] 참조), ② 후보가 되는 움직임 벡터 중에서 부호화 효율이 제일 높은 움직임 벡터를 취하는 방법(식별번호 [0114] 참조), ③ 참조 픽처의 참조 인덱스의 값이 제일 작아지는 움직임 벡터를 취하는 방법(식별번호 [0115]참조)은 구성요소 3의 모션 벡터 경쟁 방법(motion vector competitionmethod)에 포함되는 것으로 볼 수 있다. 이와 함께 선행발명 1에 후보가 되는 움직임 벡터에는 스케일링 된 모션 벡터도 포함한다는 취지의 기재(식별번호 [0007], [0098], 도면 12 내지 19, 55참조)가 있는 점도 고려하면, 구성요소 3은 선행발명 1의 대응구성요소와 실질적으로 동일하거나, 적어도 선행발명 1로부터 통상의 기술자가 용이하게 도출할수 있다고 봄이 타당하다(이 부분에 대해서는 당사자 사이에 다툼이 없다). 2) 차이점들에 대한 검토 가) 차이점 1에 대한 검토 선행발명 1에는 아래의 도 55에 도시된 바와 같이 콜로케이트 유닛(MB82)의 모션 벡터(MV81)에 대한 스케일링 인자를 계산함에 있어서, ‘현재 프레임(P83)과 콜로케이트 유닛의 모션 벡터가 참조하는 프레임(P82) 간의 거리(TR82)’를 ‘콜로케이트 유닛이 존재하는 참조 프레임(P84)과 콜로케이트 유닛의모션 벡터가 참조하는 프레임(P82) 간의 거리(TR81)’로 나누는 방법이 설명되어있다. 또한, 이 사건 출원발명의 출원일보다 약 7년 전에 발행된 'H.264/AVC비디오 압축 표준’이라는 교과서(을 제4호증)에도 이와 동일한 내용이 기재되어있는 점에 비추어, 위와 같이 콜로케이트 유닛의 모션 벡터에 대해 스케일링 인자를 계산하는 방법은 피고 주장과 같이 이 사건 출원발명의 출원일 당시 폭넓게 사용되는 주지관용기술에 해당하는 것으로 보인다. 그런데 구성요소 2는 콜로케이트 유닛과 이웃 유닛을 포함하는 후보 유닛의스케일링 인자를 계산할 때 ‘타겟 검색 프레임(프레임 j)’을 도입하고, ‘타겟 검색 프레임(프레임 j)과 현재 프레임(프레임 k) 간의 거리(타겟 시간적 거리)’와‘후보 유닛의 모션 벡터가 참조하는 프레임(프레임 I)과 현재 프레임(프레임 k)간의 거리’를 이용하여 콜로케이트 유닛과 이웃 유닛들의 모션 벡터가 참조하는프레임이 서로 다른 경우에도 동일하게 유지되는 ‘타겟 시간적 거리’에 따라 스케일링한 후 이를 후보 세트에 추가함으로써 콜로케이트 유닛과 이웃 유닛들의모션 벡터가 공정하게 경쟁할 수 있도록 하여, 현재 유닛의 모션 벡터 예측자를선택하는 모션 벡터 경쟁 방법의 정확성을 높이고 복잡도를 감소시키려는 것이다. 반면 선행발명 1의 스케일링 인자 계산은, 콜로케이트 유닛을 포함하고 있는참조 프레임과 현재 프레임이 달라 콜로케이트 유닛의 모션 벡터 크기를 현재유닛에 적합하게 조절하여야 하는 과제를 해결하기 위하여, ‘현재 프레임과 콜로케이트 유닛의 모션 벡터가 참조하는 프레임 간의 거리’를 ‘콜로케이트 유닛이 존재하는 참조프레임과 콜로케이트 유닛의 모션 벡터가 참조하는 프레임 간의 거리’로 나누는 방식으로 이루어진다. 즉, 선행발명 1의 스케일링 인자 계산방법은 콜로케이트 유닛의 모션 벡터 크기를 단순히 스케일링하기 위하여 채택된 구성으로, 후보 유닛들의 모션 벡터가 참조하는 프레임이 서로 달라 발생하는 문제를 해결하기 위해 도입된 ‘타겟 검색 프레임’과 같은 기능을 수행하는 부분이 없고, 시간적 거리가 다른 콜로케이트 유닛과 이웃 유닛들의 모션 벡터가서로 공정하게 경쟁할 수 있게 하는 효과도 기대할 수 없다.또한, 선행발명의 스케일링 인자 계산 방법으로부터 구성요소 2의 타겟 검색프레임을 이용하는 스케일링 인자 계산 방법을 도출하려면, 후보 유닛들의 모션벡터가 참조하는 프레임이 서로 달라 발생하는 문제를 해결하고자 하는 새로운목적을 고려해야 하므로, 통상의 기술자가 선행발명 1 또는 선행발명 1에 주지관용기술을 결합하여 구성요소 2를 용이하게 도출할 수 있다고 보기 어렵다. 나) 차이점 2에 대한 검토 앞서 본 바와 같이, 선행발명 1에는 콜로케이트 유닛의 모션 벡터를 스케일링하는 방법만 나타나 있고, 이웃 유닛의 모션 벡터를 스케일링하는 것에 대해서는 전혀 언급하지 아니하였다. 피고가 주지관용기술이라고 제출한 을 제4호증에도, 콜로케이트 유닛이 고려되는 시간 직접 예측 모드에서 모션 벡터를스케일링하는 내용만 소개되어 있을 뿐(10면 참조) 이웃 유닛의 모션 벡터를 스케일링하는 내용은 언급되거나 암시되어 있지 아니하다. 이러한 점들에 비추어볼 때, 이웃 유닛의 모션 벡터를 스케일링하는 구성요소가 선행발명 1 또는 선행발명 1과 주지관용기술을 바탕으로 한 단순 설계변경에 의하여 용이하게 도출될 수 있다고 보기는 어렵다. 3) 그 밖의 피고 주장에 대한 검토1) 가) 피고는, 콜로케이트 유닛과 이웃 유닛들의 모션 벡터가 서로 다른 프레임을 참조하는 것을 고려하지 않고 일률적으로 ‘타겟 검색 프레임’을 선택함으로써 최적 프레임을 선택할 때의 효과가 상실된다고 주장한다.그러나 앞서 본 바와 같이 구성요소 3에서 모션 벡터 경쟁 방법을 구체적으로 한정하지 않았으므로 ‘타겟 검색 프레임’을 도입하여 스케일링 된 모션 벡터들뿐만 아니라 종래 이웃 유닛과 콜로케이트 유닛의 모션 벡터들도 모션 벡터 예측자 선택을 위한 모션 벡터 간의 경쟁 단계에서 고려되는 후보 세트에 포함될 수 있다(갑 제6호증, 을 제1호증, 식별번호 [0007] 참조).따라서 기존의 콜로케이트 유닛과 이웃 유닛들의 모션 벡터가 모션 벡터 예측자 후보 세트에서 제외됨을 전제로 한 원고의 위 주장은 받아들일 수 없다.나) 피고는, 이웃 유닛의 모션 벡터를 스케일링함으로 인하여 공간예측모드에서 이용하고 있는 프레임 내 수평수직 2차원 공간의 상관도에 영향을 주기 때문에 종래의 효과가 감소될 것이라고 주장한다. 그러나 이웃 유닛들의 모션 벡터 간의 상이한 시간적 거리가 스케일링에 의하여 선형적으로 제거되는 이상 프레임 내 수평수직 2차원 공간의 상관도가 크게 왜곡될 것으로 보이지 않을 뿐만 아니라, 설령 프레임 내 수평수직 2차원 공간의 상관도에 영향을 주더라도 앞서 언급한 바와 같이 스케일링 된 모션 벡터뿐만 아니라 스케일링 되지 않은 종래의 이웃 유닛의 모션 벡터들도 다음 단계의 모션 벡터 경쟁 방법에 적용되는 모션 벡터 예측자의 후보 세트에 포함될 수있다. 따라서 원고의 위 주장은 이유 없다. 다) 피고는, 콜로케이트 유닛의 모션 벡터를 스케일링함에 있어서 콜로케이트 유닛이 존재하는 프레임을 고려하지 않으므로 기존 스케일링 방법의 효과가상실될 것이라고 주장한다.그러나 타겟 검색 프레임을 선택함에 있어서 현재 프레임과 모션 벡터의 참조 프레임뿐만 아니라 콜로케이트 유닛이 위치한 프레임도 당연히 고려할 것으로 보이는 점, 실시례와 마찬가지로 현재 프레임과 모션 벡터의 참조 프레임 사이에 타겟 검색 프레임을 선택하는 경우에 시간 방향의 움직임 상관도를 이용한종래의 효과가 유지될 것으로 보이는 점, 종래 방식으로 스케일링한 콜로케이트유닛의 모션 벡터들도 다음 단계의 모션 벡터 경쟁 방법에 적용되는 모션 벡터예측자 후보 세트에 포함될 수 있는 점 등에 비추어 볼 때, 원고의 위 주장은 받아들이기 어렵다. 4) 대비 결과 결국, 이 사건 제1항 출원발명은 선행발명 1 또는 선행발명 1과 주지관용 기술의 결합에 의하여 진보성이 부정되지 아니한다. 다. 소결 이상에서 본 바와 같이 이 사건 제1항 출원발명은 선행발명 1 또는 선행발명 1과 주지관용기술의 결합에 의하여 진보성이 부정되지 아니하는바, 이 사건 심결은 이와 결론을 달리하여 위법하다. |
| 결론 | 3. 결론 따라서 이 사건 심결의 취소를 구하는 원고의 청구는 이유 있으므로 이를 인용하기로 하여 주문과 같이 판결한다. |
| 번호 | 사건번호 | 제목 | 분야 | 출원번호 | 법원명 | 날짜 | 조회 수 |
|---|---|---|---|---|---|---|---|
| 194 | 2015허8578 거절결정(특) |
2015허8578 거절결정(특)
|
특허/실용신안 | 제10-2013-108946호 | 특허법원 | 2020.06.24 | 212 |
| 193 | 2016허2850 권리범위확인(특) |
2016허2850 권리범위확인(특)
|
특허/실용신안 | 제1385820호 | 특허법원 | 2020.06.24 | 46 |
| 192 | 2016허4955 권리범위확인(특) |
2016허4955 권리범위확인(특)
|
특허/실용신안 | 제1128399호 | 특허법원 | 2020.06.23 | 48 |
| 191 | 2015허8547 권리범위확인(특) |
2015허8547 권리범위확인(특)
|
특허/실용신안 | 제1189110호 | 특허법원 | 2020.06.23 | 40 |
| 190 | 2016허342 권리범위확인(특) |
2016허342 권리범위확인(특)
|
특허/실용신안 | 제1460020호 | 특허법원 | 2020.06.23 | 44 |
| 189 | 2015허8042 등록무효(특) |
2015허8042 등록무효(특)
|
특허/실용신안 | 제1230541호 | 특허법원 | 2020.06.23 | 34 |
| 188 | 2015허3948 등록무효(특) |
2015허3948 등록무효(특)
|
특허/실용신안 | 제952995호 | 특허법원 | 2020.06.23 | 52 |
| 187 | 2016허6333 거절결정(특) |
2016허6333 거절결정(특)
|
특허/실용신안 | 제10-2014-0048768호 | 특허법원 | 2020.06.23 | 39 |
| » | 2016허1710 거절결정(특) |
2016허1710 거절결정(특)
|
특허/실용신안 | 제10-2012-7030207호 | 특허법원 | 2020.06.23 | 48 |
| 185 | 2015허7209 정정무효(특) |
2015허7209 정정무효(특)
|
특허/실용신안 | 제707484호 | 특허법원 | 2020.06.23 | 82 |
| 184 | 2015허8608 권리범위확인(특) |
2015허8608 권리범위확인(특)
|
특허/실용신안 | 제1480707호 | 특허법원 | 2020.06.23 | 38 |
| 183 | 2015허7490 권리범위확인(특) |
2015허7490 권리범위확인(특)
|
특허/실용신안 | 제854246호 | 특허법원 | 2020.06.23 | 56 |
| 182 | 2015허3412 권리범위확인(특) |
2015허3412 권리범위확인(특)
|
특허/실용신안 | 제601190호 | 특허법원 | 2020.06.22 | 48 |
| 181 | 2015허8073 등록정정(특) | 2015허8073 등록정정(특) | 특허/실용신안 | 제354072호 | 특허법원 | 2020.06.22 | 55 |
| 180 | 2016허90 등록무효(특) |
2016허90 등록무효(특)
|
특허/실용신안 | 제1258831호 | 특허법원 | 2020.06.22 | 81 |
| 179 | 2015허5012 등록무효(특) |
2015허5012 등록무효(특)
|
특허/실용신안 | 제1195229호 | 특허법원 | 2020.06.22 | 70 |
| 178 | 2015허7391 거절결정(특) |
2015허7391 거절결정(특)
|
특허/실용신안 | 제10-2013-7024719호 | 특허법원 | 2020.06.22 | 34 |
| 177 | 2015허6633 거절결정(특) |
2015허6633 거절결정(특)
|
특허/실용신안 | 제10-2012-62298호 | 특허법원 | 2020.06.22 | 1231 |
| 176 | 2014허9376 거절결정(특) |
2014허9376 거절결정(특)
|
특허/실용신안 | 제10-2007-75584호 | 특허법원 | 2020.06.22 | 53 |
| 175 | 2015허2976 권리범위확인(특) |
2015허2976 권리범위확인(특)
|
특허/실용신안 | 제857260호 | 특허법원 | 2020.06.22 | 652 |
 2016허6333 거절결정(특)
2016허6333 거절결정(특)
 2015허7209 정정무효(특)
2015허7209 정정무효(특)